
YASKAWA机器人伺服驱动器的自动调整方法,调整伺服系统是一个复杂而迭代的过程。它通常需要调整多个控制回路,同时,每个控制回路都需要调整自己的增益(比例、积分和微分)及额外的参数,如加速度和速度前馈增益以及减少振荡的过滤器。
广州安川机器人维修:虽然多年来手动调谐是业内的主要方法,但现在大多数伺服驱动器都具有自动调节系统的功能。不同于一开始自动调谐功能仅在负载刚性耦合并且系统动力学相对简单的时候才有用,随着复杂算法的出现和计算机能力的提升,如今机器自带的自动调谐功能即使在没有人手动操作的情况下也能自主解决大部分复杂问题。
安川驱动器维修,自动调谐和手动调谐工作原理相同——通过给定的命令来评估电机的性能,安川YASKAWA机器人伺服驱动器会自动调整增益,直到发现获得最佳性能的值为止。在大多数情况下,自动调谐过程还可以向控制环路添加滤波器,以抑制由系统中的共振频率引起的振荡。
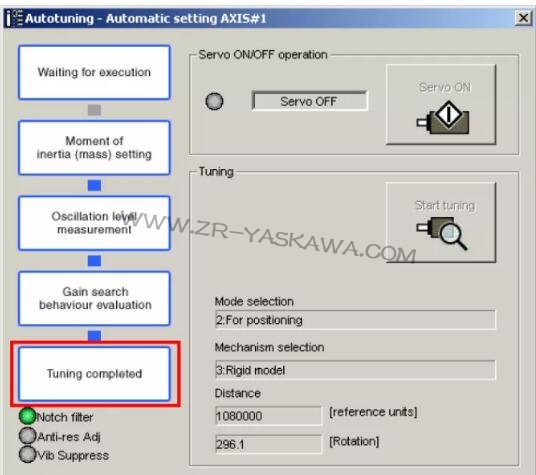
由于电机和负载在该安川伺服驱动器的自整定过程中被驱动,驱动器自动确定系统的惯性、测量振荡,并设置、评估和优化控制回路增益。
安川驱动器维修自适应调谐类似于自动调谐,但它允许的参数范围更广,会提供对伺服系统的稳定控制。自适应调谐会持续监控系统的性能,并在必要时调整控制回路增益和滤波器参数,以补偿系统运行期间未知或变化的负载状况。自适应调谐的关键是它在控制系统的背景下连续运行,通过分析转矩回路的频率响应来检测谐振。
安川YASKAWA机器人驱动器,一个参数调整通常是指一种调谐功能,可以在配置自适应调谐后用于“微调”系统的响应。术语“一个参数”调整来自于使用单个参数来配置多个系统属性,包括增益、滤波器、摩擦补偿和共振控制。这提高了系统的响应性、稳定性、过冲和整体效率。



