安川工业机器人机械手运动指令和步骤
安川机器人机械手使用作业指令来实现运动和执行再现,这些指令叫做运动指令。目的位置,插补方法,运行速度等等信息都记录在运动指令中。
叫做运动指令的原因是,主体指令都是以“MOV”开始。“MOV”是一种用于XRC 系统中的“INFORM Ⅱ”语言。
比如:
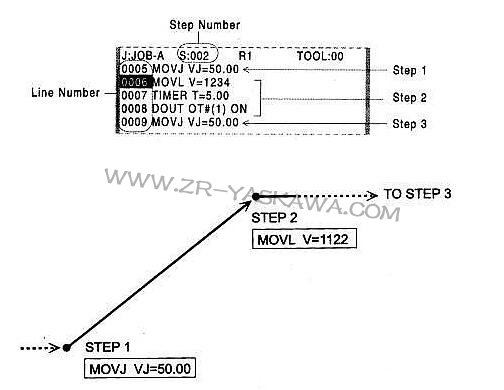
从一条运动指令到下一条运动指令为一步。步骤1为001,步骤2为002,步骤3为003,等等。
步骤1的位置即为记录有步骤号001(S: 001)的运动指令处的位置。
例如:
参照下面的作业的内容,当执行再现时,机械手由步骤1向步骤2运动,运动速度记录在步骤2的运动指令中。在机械手到了步骤2之后,机械手执行TIMER指令,再执行DOUT指令,然后继续执行步骤3。