
安川机器人原点及校准浅析
何谓原点?
既然说到原点校准,那么就要来探讨一下,什么是机器人原点?安川机器人的随机资料中有这样一句话:原点位置校准是将“机器人位置”与“编码器位置”进行对照确认。
安川机器人位置:
各大品牌机器人都有所谓的原点标记,也就是在本体上各轴或者关节处能看到的标识点,安川的大部分机器人是红色箭头加刻度线。
编码器位置:
建议大家到网上百度下关于编码器的资料,以方便更好的理解)编码器反馈到机器人上就是脉冲值。
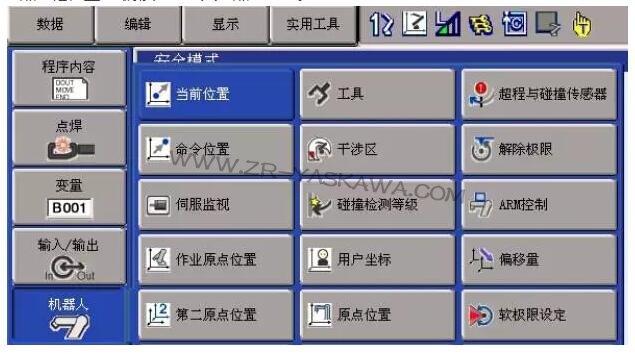
安川机器人有个菜单,叫做“当前位置”,此菜单下调整显示“脉冲值”,当脉冲值调整为“0”时,若“原点标记位置”无偏移则机器人原点无问题。
原点是机器人一切动作的基准点!
机器人出厂时已校准过原点位置校准,但下列情况需要再次校准原点位置:
更换机器人和控制柜(DX200)的组合时;
更换电机或者编码器时;
内存被删除时,(更换内存基板、本体编码器电池耗尽、控制柜内存储电池耗尽时等);
机器人与工件发生碰撞导致原点位置偏离时甚至产生轻微形变。
那么原点丢失我们该如何进行操作?
原点丢失有两种情况:
A、丢失个别轴的原点;B、丢失所有轴原点。
全部轴同时创建:更换机器人和控制柜的组合时,全部轴同时登录原点位置。
各轴单独创建:更换马达或编码器时,单独登录马达或编码器对应的各轴原点位置。
无论进行全部轴同时创建还是各轴单独创建,我们要做的第一步都是:
在关节坐标系下,使用[轴操作键]调整机器人的姿势,用肉眼目测,使各轴的“原点标记位置”一致。然后在机器人菜单下进行全轴或者单轴创建。
当然,用肉眼进行原点校准,肯定存在一定误差,但是可以满足正常生产,保证机器人及程序正常运行,注意程序点是需要微调的。



