
安川机器人驱动器维修常见的两个故障:
安川机器人驱动器维修调试过程过电压过电流是两个比较常见的故障,下面就这两个故障做些分析,更好的帮助调试人掌握故障的基理及产生的原因,能够较快的了解故障点排除故障,让设备能尽早投入运行。
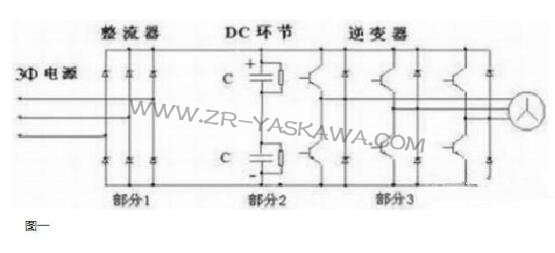
一:过电压故障,这里所指的电压常指直流母线电压,图一是常见市场驱动器主回路电路,P和N之间的电压就是直流母线电压。
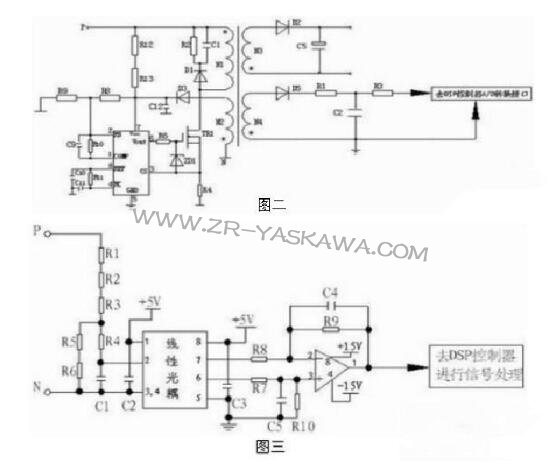
直流母线电压的读取,驱动器CPU无法读取很高的电压,所以必需得通过电路转化将高电压转化为CPU可以读取的低电压,常见的有变压器输出读取法和电阻降压读取法,见图二,图三。
从上述原理图分析,过电压产生第一种是种种原因造成的驱动器C和D之间电压高于额定电压,在过电压发生时,直流母线的储能电容将被充电,当电压升至760V(此值有些驱动器可调)左右时,驱动器过电压保护动作,第二种情况是检测电路出现故障,正常的电压值被检测电路读成过电压或读成欠电压。
直流母线电压过高主要有以下原因,第一种输入电压过高所致,第二种减速时减速时间过短,电机受外力影响(风机,牵绳机)或位能负载(电梯,起重机)下放,由于这些原因,使电机的实际转速高于驱动器的指令转带,这时电机的转差率为负,其产生的电磁转矩为阻碍旋转的制动转矩,电动机处于发电状态,负载的动能再生成为电能,再生能量经IGBT的续流二极管动后给电容器充电,使直流母线电压上升,这就是再生过电压,应用调试中过压问题的解决,由于过电压产生的原因不同,因而采取的对策也不相同。对于在停车过程中产生的过电压现象,如果对停车时间或位置无特殊要求,那么可以采用延长驱动器减速时间或自由停车的方法来解决。如果对停车时间或停车位置有一定的要求,那么可以采用直流制动功能或再生制动。
安川机器人驱动器维修,应用调试中如果直流母线电压正常,而驱动器报过压或欠压故障,这时候就是考虑驱动器本身问题,是否检测电路哪个环节出现问题而造成,可以对电压检测电路有针对性的进行检测排除。
二:过流故障:驱动器的过流故障是最常见也是较复杂的故障,当过流故障发生时,驱动器保护电路会立即动作并停机,同时驱动器显示故障代码或故障类型。大多数情况下可以根据驱动器显示的故障代码迅速找到故障原因并排除故障,但也有一些过流故障的原因是多方面的,并不是单一的,而是包含了加速、减速、恒速过流、负载发生突变、输出短路等各种可能导致过流护的因素。



