
· 交流伺服电机:运行稳定、可控性好、响应快速、灵敏度高
· 直流伺服电机:具有良好的线性调节特性及快速的时间响应
yaskawa机械手伺服马达组成
· 电机
· 编码器
· 控制器
· 驱动器
电机低速爬行
- 调整参数N.10、N.11、N.12,适当增加系统增益,或运行驱动器自动增益调整功能。
yaskawa机械手伺服马达过热
- 伺服马达散热系统有没有在正常的工作,如果有问题的话,需要修复散热系统。
- 检查一下马达定子线圈是否短路或断路,有损坏的话,就要更换线圈。
安川机械臂电机不能启动
- 看看电源连接正不正常,电源电压在不在规定的范围数值内。
- 查看一下YASKAWA工业机器人电机定子线圈是否断路或短路,如果损坏了就直接更换。
子锐机器人常见安川机器人伺服电机维修型号有:YASKAWA机械臂伺服马达SGMPH-04A1A-YR12维修,安川机械手伺服电机 SGMAV-A5ANA-YR13维修,yaskawa机器人电机SGMAV-01ANA-YR13维修等。
伺服马达振动大
- 检查看看安川工业机械臂马达轴承有没有存在磨损或是损坏的现象,有的话就需要更换轴承了。
- 看看yaskawa机器人驱动器增益设置有没有过高,适当的降低系统的增益。
- 电机安装基础稳不稳固,有问题的话就要重新安装基础。
电机噪声大
- 安川工业机械手马达轴承是不是磨损了或者是损坏了,如有需要更换轴承。
- 看一下马达转子是不是有异物卡住了,如果是的话就要清除掉异物。
- 检查伺服电机外壳有没有松动或是变形,有需要的话就要修复YASKAWA机械臂伺服马达外壳了。
来个题外话:
安川机器人平移命令
SFTON
(1)SFTON P001 UF#(1)
移动量被设定在 p000 上,通过用户坐标系移动。
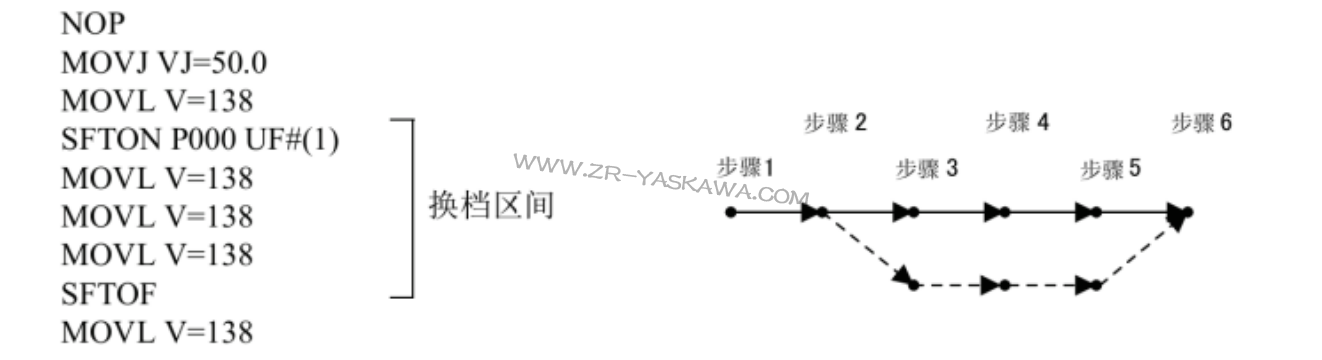
从步骤 3 到步骤 5 的移动量被设定在 p000 上,通过用户坐标系移位。
MSHIFT
功能:在指定坐标系,利用数据 (2 )和数据( 3 )的计算,得出平移量,存入数据( 1 )里。
格式: MSHIFT <数据 1> <坐标 > <数据 2 > <数据 3>




