

在工业生产环境中,安川机器人持续承担着高强度作业任务,其本体清洁是安川机器人保养的重要环节。 ...
弧焊节气:安川焊接机器人保护气节约方法
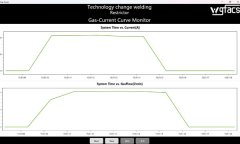
在工业弧焊领域,保护气成本占据焊接生产成本的重要部分。安川焊接机器人引入 WGFAC 节气装置,凭借创新技术与智能调控,实现保护气的高效利用,显著提升安川焊接机器人节气水平,为企业降本增效提供全新解决方案。 ...

安川机器人管材焊接智能节气仪
在工业焊接领域,气体消耗成本是生产运营的重要组成部分。安川机器人管材焊接智能节气仪(WGFACS)的出现,为企业实现节能降耗提供了有效途径,显著提升了安川焊接机器人节气的效率与精准度。 ...


YASKAWA半导体晶圆机械手维修知识概括
聚焦于YASKAWA机器人维修的具体内容。YASKAWA作为全球领先的工业机器人制造商之一,其产品广泛应用于各个行业。即使是最先进的设备也会遇到机器人故障。掌握YASKAWA机器人维修技术对于确保生产线的正常运行至关重要。在进行半导体晶圆机械手维修时,工程师需 ...

YASKAWA安川六轴机工业器人保养维护
在现代工业生产环境中,YASKAWA安川六轴工业机器人扮演着不可或缺的角色。为了确保其持续稳定地运行并发挥最佳性能,安川机器人保养工作显得尤为重要。 ...



