
1、首先,确保变稳压器的【电源开关】处于关闭状态,然后谨慎地将其打开,并稳稳地按下电源【启动】按钮,等待系统初步启动。
2、紧接着,打开控制箱的【电源开关】,此时,需密切关注教导器画面上的提示信息,按照指引准确地按下【伺服按钮】,以激活伺服系统。
简单操作YASKAWA机器人的步骤概述:
1、首先,在示教编程器上,轻轻地按下【伺服准备】按钮,随后,【伺服接通】的LED灯会开始闪烁,预示着伺服系统即将进入工作状态。
2、接着,稳稳地握住安川机械臂示教编程器的启动开关,并轻轻地按下,此时,伺服电源将被接通,示教编程器的【伺服接通】LED灯也会随之亮起,表明伺服系统已经正式投入工作。
3、在操作过程中,务必时刻注意机器人本体的位置和姿势,将运行速度调至低速模式,以确保操作的安全性,防止意外事故的发生。
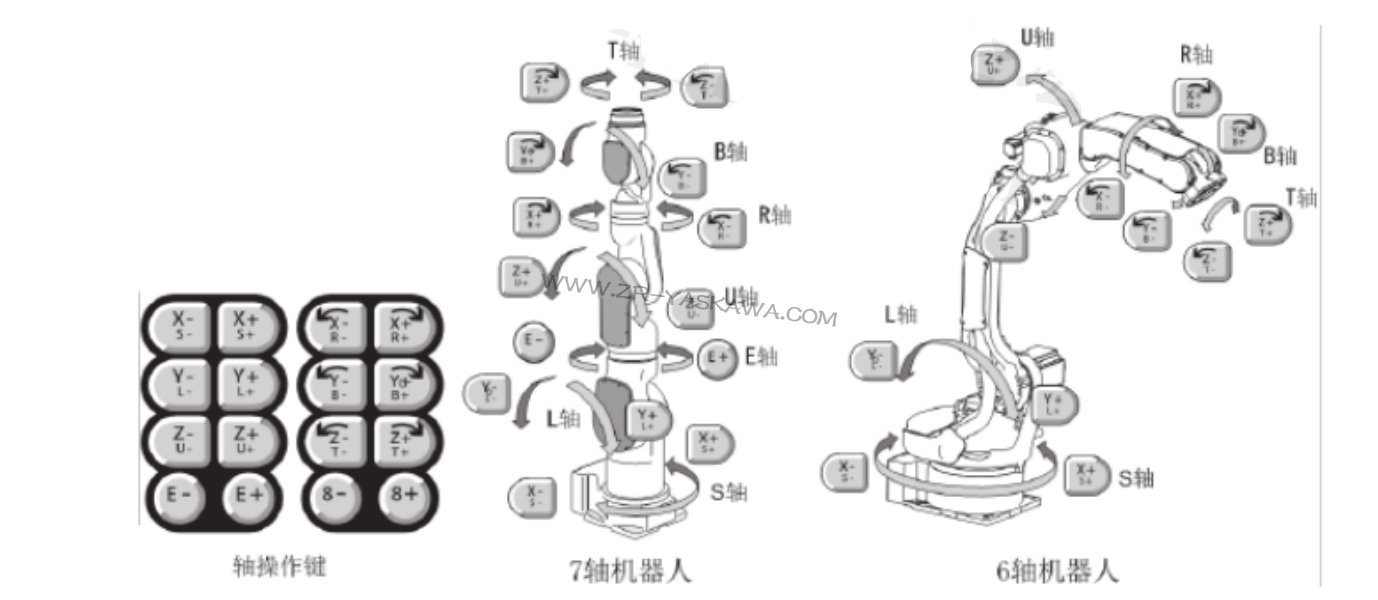
4、在控制机器人运动时,可以选择使用关节坐标或直角坐标来带动yaskawa机器人进行精准的操作。其中,关节坐标的运转方式【如图】所示,能够更直观地模拟机器人的自然运动轨迹。
1. 故障排查环节
- 视觉检查:首先,对线缆的外观进行仔细的检查,观察其表面是否有明显的破损、断裂或变形迹象,以便及时发现潜在的安全隐患。
- 连续性测试:使用专业的万用表或测试仪器,对yaskawa机械手ES165N线缆的导通性进行测试,以确认是否存在断路或短路现象,确保线缆的电气性能正常。
- 接触检查:检查线缆接头是否牢固可靠,接触是否良好,同时观察接头处是否有腐蚀或氧化现象,以确保接头的电气连接质量。
2. 维修方法概述
- 更换破损线缆:对于已经断裂或严重破损的线缆,应及时更换为新的安川ES165N工业机械臂线缆,并确保新线缆的规格与原始线缆相符,连接正确无误。
- 接头修复处理:对于接触不良的接头,可以采取重新焊接或更换接头的方式进行处理,以确保接头的电气连接质量达到要求。
- 绝缘处理措施:对于出现短路故障的线缆,需要找到短路点并进行绝缘处理,必要时可以更换整段线缆以确保安全。
3. 测试与验证环节
- 完成安川机器人维修后,需要对机器人进行全面的测试运行,观察线缆的工作状态是否正常,确保维修效果达到预期。
- 同时,监测机器人的各项参数指标,确保机器人的性能不受影响,能够稳定可靠地运行。
1. 定期检查与维护:定期对yaskawa机器人ES165N本体线缆进行检查和维护工作,及时发现并处理潜在的安全隐患和问题,确保线缆的可靠性和安全性。
2. 正确操作规范:在机器人的移动和操作过程中,避免对线缆造成过度的拉伸和扭曲等机械损伤。同时,正确安装和固定线缆,防止其受到机械应力的影响而损坏。
3. 环境控制要求:保持安川工业机械手工作环境的清洁和干燥状态,避免高温高湿和腐蚀性环境对线缆造成损害和侵蚀。通过采取有效的环境控制措施,延长线缆的使用寿命并提高机器人的整体性能。



