
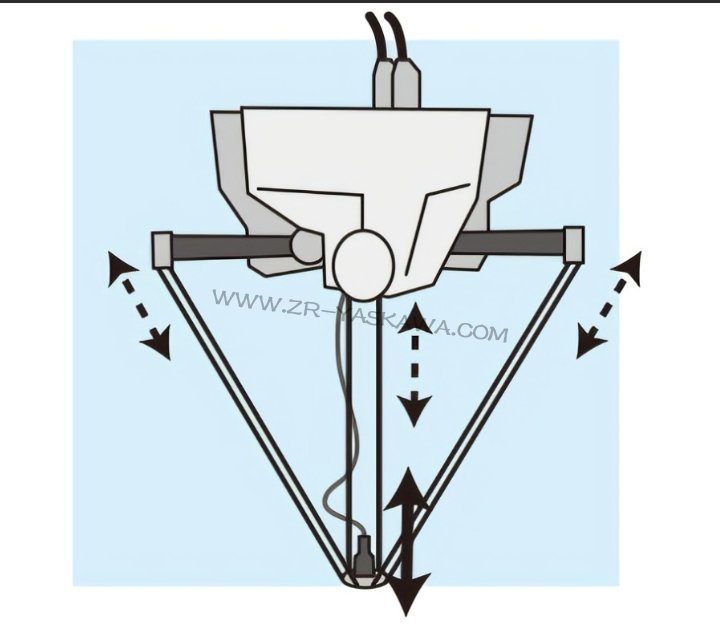
安川蜘蛛手并联机器人,作为一款专为高速、轻载作业设计的并联机器人,又常被业界亲切地称为分拣机器人。它巧妙地利用三个并联的伺服轴,精准地确定抓取中心位置,从而高效地实现目标物体的运输或加工任务。这款机器人的特性显著,集高速、精准、开放性和卓越的承载能力于一身。其操作方式灵活多样,既可通过示教编程轻松上手,又能借助先进的视觉系统精准捕捉目标物体。它还支持视觉模块、IO模块的便捷添加,承载能力更是达到了3kg及以上,充分满足了多样化的作业需求。

谈及安川蜘蛛手并联机器人维修的优势,以下几点尤为突出:
精确抓取能力令人瞩目。得益于先进的视觉识别系统和精密的运动控制技术,机器人能够准确无误地识别和抓取各种形状、尺寸及重量的物料,极大地降低了分拣过程中的错误率,提升了作业效率。
灵活性方面同样表现出色。其六自由度的设计赋予了机器人在狭小空间内灵活操作的能力,无论是多么复杂的分拣环境和需求,都能轻松应对,展现出强大的适应能力。
高速分拣更是其拿手好戏。得益于并联机器人结构的优势和高性能运动控制系统的加持,机器人能够以惊人的速度进行连续分拣作业,显著提升了生产效率,为企业创造了更大的价值。
在节省人力方面,YASKAWA并联机器人同样功不可没。自动化分拣系统的引入,不仅大幅减少了人工操作,降低了劳动力成本,还有效提升了工作环境的安全性,为员工提供了更加舒适、安全的作业环境。
安川蜘蛛手并联机器人维修究竟是如何实现这些卓越性能的呢?其工作原理主要涵盖以下几个部分:
首先是控制部分。一个高效、精准的控制系统是机器人正常运作的核心。这个系统可以是硬件系统,也可以是软件系统,它们都需要根据预设的运动轨迹,精确计算出每个关节的运动参数,并将这些参数发送给驱动器,驱动机器人按照预设轨迹进行运动。
其次是执行部分。执行部分主要由各个关节组成。每个关节都配备了独立的驱动器和控制系统,可以独立进行运动。然而,当多个关节协同工作时,就需要控制系统来精确协调它们的运动,以确保实现对物体的精细操作。
此外,视觉识别系统和智能算法也是不可或缺的一部分。安川蜘蛛手并联机器人搭载了先进的视觉识别系统和智能算法,能够实时对海量物品进行定位、识别和追踪,实现智能化、无人化的流水线作业,大大提高了作业的准确性和效率。
驱动部分同样至关重要。每个关节都配备了一个独立的驱动器,这些驱动器可以是电机、气缸或其他类型的驱动器。它们为关节提供动力,使其能够按照控制系统的指令进行运动。
最后值得一提的是其模块化设计。安川蜘蛛手并联机器人维修采用了模块化的设计理念,使得维护更加简便,使用寿命更长。同时,稳定的运行性能也确保了投资的高回报率,为企业带来了更多的经济效益。
综上所述,安川蜘蛛手并联机器人维修通过驱动、控制和执行三个部分的紧密协作,结合先进的视觉识别系统和智能算法,实现了对物体的精细操作。在物流分拣、工业生产等领域展现出了强大的效能和广泛的应用前景。



