
YASKAWA机械臂维修I/F基板损坏的根源颇为复杂,以下是若干常见的潜在诱因:
当外部负载遭遇故障时,其异常的工作状态或突如其来的负载变化,有可能给I/F基板带来无法承受的压力,进而导致其损坏。
电源方面的问题同样不容忽视。无论是电源连接的不稳定、电缆的磨损乃至断裂,还是电源开关和连接线的异常,这些因素都可能成为I/F基板损坏的“导火索”。
在机器人控制柜内,如果温度超出了正常的工作范围,过高的温度将如同无形的,悄无声息地对I/F基板造成损害。
通信错误也是导致机器人I/F基板损坏的一个重要原因。当YASKAWA机械臂维修I/F基板与其他关键组件(诸如伺服控制基板、电源接通单元等)之间的通信链路出现异常时,信息的传递将受到阻碍,进而可能引发I/F基板的故障。
YASKAWA机械臂维修I/F基板自身的硬件问题同样值得警惕。元件的老化、短路等硬件层面的故障,都可能直接导致I/F基板的损坏。
在操作或使用机器人的过程中,如果操作人员未能遵循正确的步骤或方法,误操作或不当使用同样有可能对I/F基板造成不可逆的损害。
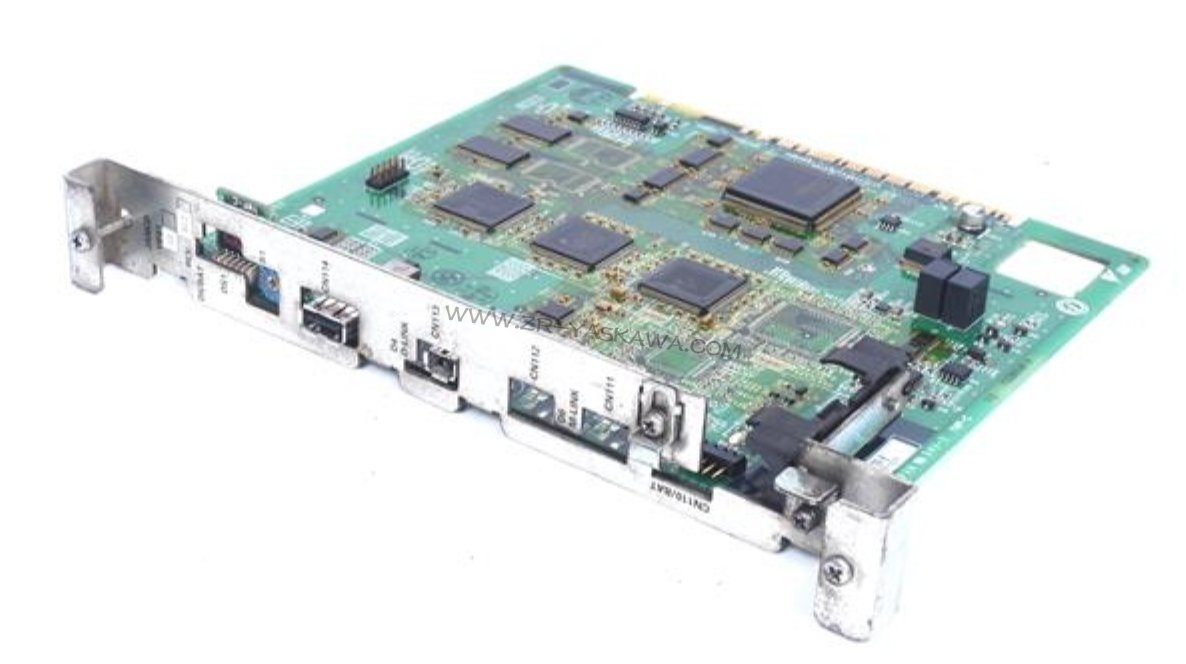
在进行基板更换时,切断电源是至关重要的一步。因为机器人I/F单元中存储着程序、参数等重要数据,一旦这些数据丢失,将给调试和使用带来极大的麻烦。更换基板的详细步骤如下:需要将与基板连接的电线全部小心翼翼地取下,注意基板底部也可能存在插头,同样需要取下;使用工具松开机架上用于固定基板的上下螺钉(每处一个,共两个);轻轻地将基板从机架中取出;将新的基板沿着机架的沟槽平稳地插入;拧紧上下螺钉以固定基板;再将之前拆下的电线一一装回原位;将旋转开关设置为与原基板相同的值;接通主电源,并在维护模式下选择主菜单的“外部存储”,选择“安装”,以安装CMOS数据。
值得注意的是,当从机架中取出安川机器人维修I/F单元的替换单元(JZNC-NIF01)后,应避免长时间放置。因为基板内的电容在充满电,16小时内会全部耗尽。一旦电容耗电完毕,CMOS数据(包括系统设定和用户设定)将全部丢失,这将对机器人的使用造成极大的不便。



