
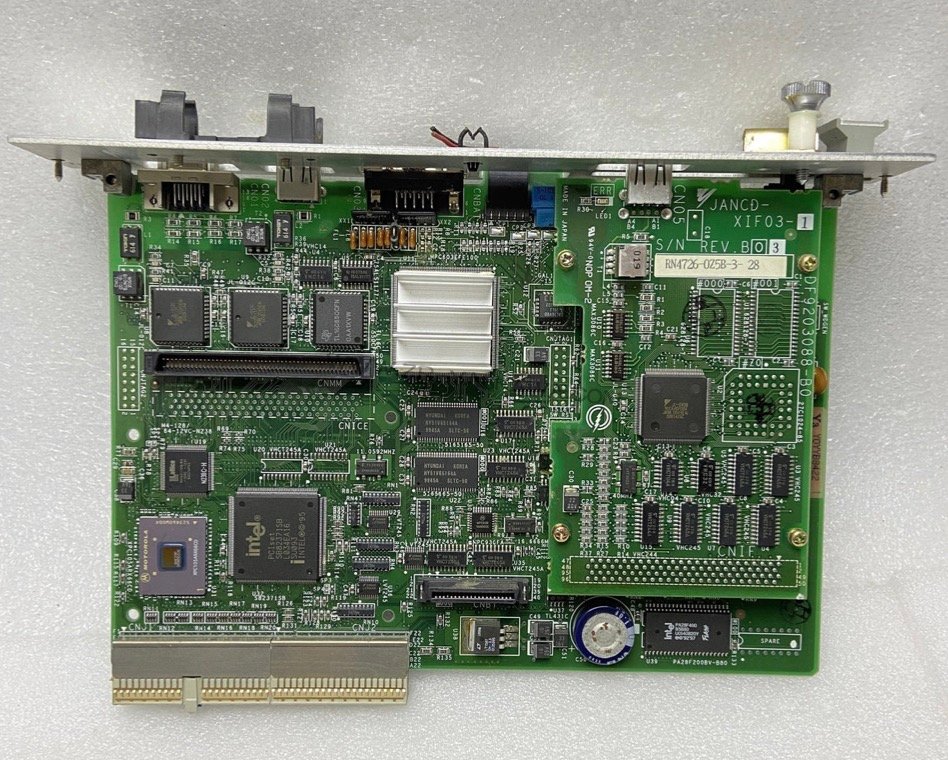
MOTOMAN机械手维修CPU基板在机器人系统中扮演着举足轻重的角色,它肩负着控制和运行系统的艰巨使命,确保每一条操作指令都能被机器人准确无误地执行。它不仅是内核芯片与外界沟通的桥梁,保障机器人与其他部件或系统间信息的顺畅交换,更是整个机器人高效稳定运行的关键所在。一旦CPU基板出现故障,将直接对机器人的运行效率和可靠性造成严重影响。
为了精准检测安川机器人维修CPU基板是否存在虚焊这一潜在问题,可以采取以下几种科学有效的方法:

光学检测法借助显微镜的精密放大功能,对焊点进行细致入微的观察,寻找是否存在短路或虚焊的迹象。虚焊焊点往往呈现出形状不规则、圆形四周不光滑等特征,其尺寸也可能明显偏小。
X射线检测技术则能够深入内部,透视焊接状况,通过检测焊点是否光滑、边界是否清晰、是否存在空洞,以及所有焊点的直径、体积、灰度和对比度是否保持一致,位置是否准确无误、无偏移或扭转、无焊锡球等细节,来全面评估焊接质量。
电气测试则是通过测试电路的连通性,来间接判断是否存在虚焊现象。虚焊可能导致电路连接不稳定,进而影响电气性能,电气测试成为检测虚焊的重要手段之一。
金相分析法则更加深入,通过对焊点进行金相分析,可以揭示焊点内部是否存在裂纹等缺陷。这些裂纹一旦爆发,将直接导致机械及电气性能的失效,即所谓的“虚焊”问题。
在MOTOMAN机器人维修CPU基板虚焊问题时,需要借助一系列专业的焊接工具和材料。助焊剂作为化学物质,能够清洁焊接表面,提高焊料的流动性和焊接质量;镊子则用于夹取和放置微小的电子元件,确保在焊接过程中元件位置的准确无误;北桥散热片则起到保护作用,防止北桥芯片在焊接过程中因过热而损坏;一字螺丝刀用于拆卸和安装CPU架和CPU座架;而小炉子则通过加热CPU座,使焊料重新流动,从而修复虚焊问题。
在维修安川机器人CPU基板的过程中,为了避免造成进一步的损坏,必须高度警惕以下风险因素:
静电放电(ESD)可能对敏感的电子元件造成毁灭性的打击。在安川机器人维修维修前,必须采取适当的静电放电保护措施,如佩戴静电手环、使用静电放电垫等,以确保万无一失。
使用不合适的工具或不正确的操作方法可能导致物理损坏。必须确保使用正确的工具,并严格按照制造商的指导进行操作,以免给元件带来不必要的伤害。
在拆卸和重新安装过程中,过度用力可能会导致元件损坏或焊点松动。必须格外小心,避免施加不必要的压力,确保每一步操作都精准无误。
在焊接或使用热风枪时,如果温度过高或时间过长,可能会对元件造成热损伤。必须严格控制温度和时间,并在操作过程中密切监控,以确保元件的安全。
灰尘、油污和其他污染物可能会影响元件的性能。在维修前,必须确保工作环境干净整洁,并使用适当的清洁剂对元件进行清洁处理。
误操作可能会导致进一步的损坏。必须仔细阅读并遵循制造商提供的维修指南和安川机器人维修操作步骤,确保每一步都按照规范进行。
在维修过程中,电源管理同样至关重要。必须确保电源已经关闭,并拔掉电源插头,以避免意外的电击或短路事故。
在更换元件时,必须确保使用与原始元件兼容的替代品。使用不兼容的元件可能会导致系统不稳定或进一步的损坏,给维修工作带来更大的挑战。
在更换或修复CPU基板后,还必须确保软件版本与硬件兼容。不兼容的软件可能会导致系统故障或不稳定,影响工业机器人维修的正常运行。
通过全面考虑并严格注意这些风险因素,可以大大降低在YASKAWA机器人维修过程中对安川机器人CPU基板造成进一步损坏的可能性,从而确保维修工作的顺利进行和机器人的稳定运行



