
在半导体制造等精密工业领域,安川晶圆搬运机械手起着至关重要的作用。然而,随着使用时间的增长和复杂的工作环境影响,它可能会出现各种故障,需要及时维修。
维修的基本步骤
故障诊断
当安川晶圆搬运机械手出现问题时,首先要进行全面的故障诊断。对于YASKAWA机器人故障,我们需要借助专业的诊断工具。检查机器人的控制系统,查看是否有报错代码。例如,如果出现特定的报错代码,这可能指向某个特定的YASKAWA机器人维修方向,如电机故障或者通信故障。
在晶圆搬运机器人维修过程中,要特别关注其运动部件。由于晶圆搬运的高精度要求,任何微小的偏差都可能导致故障。对于半导体机器人维修来说,检查传感器的工作状态是关键。传感器如果出现故障,可能会影响到机器人对晶圆的抓取和搬运准确性。
部件检查与更换
在安川机器人维修中,对机械手的关节部位要仔细检查。这些部位在长期的晶圆搬运过程中,容易出现磨损。对于YASKAWA机器人维修,如果发现关节处的电机出现异常,如噪音过大或者转动不顺畅,可能需要更换电机。
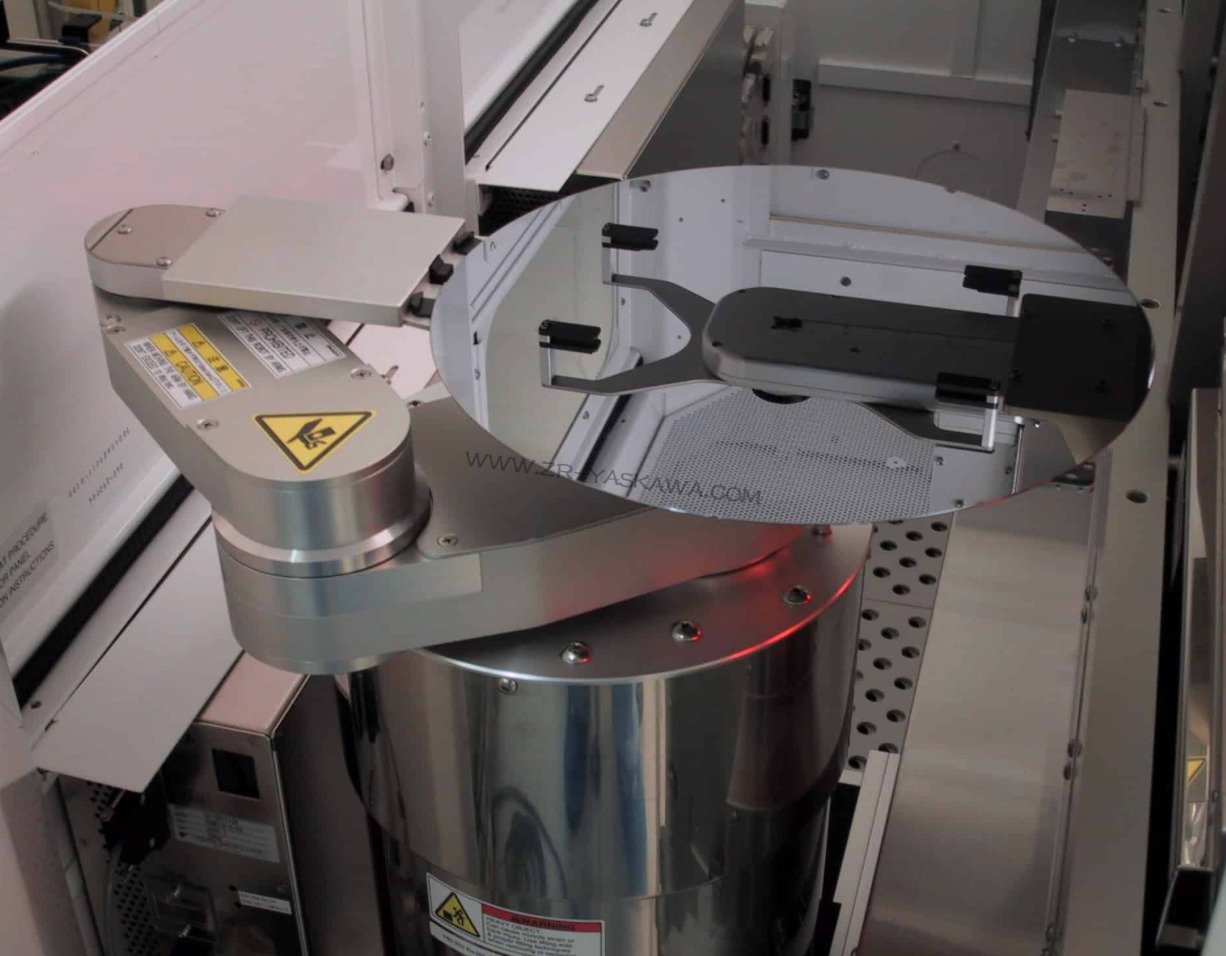
在安川晶圆搬运机器人维修时,末端执行器(用于抓取晶圆的部件)是重点检查对象。如果末端执行器出现损坏,会直接影响到晶圆的搬运。对于半导体机器人维修,还要检查连接部件,如线缆等。如果线缆出现破损或者接触不良,这也是YASKAWA机器人故障的一个常见原因,需要及时进行维修或者更换。
软件调试
安川机器人维修不仅仅涉及硬件方面,软件调试也非常重要。在YASKAWA机器人维修过程中,要检查机器人的控制程序是否存在漏洞或者错误。对于晶圆搬运机器人维修,软件控制着机器人的运动轨迹和操作精度。如果软件出现问题,可能会导致晶圆在搬运过程中出现位置偏差等半导体机器人维修问题。
在处理YASKAWA机器人故障时,可能需要对软件进行重新校准。例如,重新设置机器人的运动参数,以确保其在晶圆搬运过程中的准确性。这在半导体制造环境中,对于保证晶圆的质量和生产效率至关重要。
运动精度下降
在半导体机器人维修中,运动精度下降是比较常见的YASKAWA机器人故障。这可能是由于机械部件的磨损或者软件参数的偏差。对于安川机器人维修,首先要检查机械结构,如关节的间隙是否过大。如果是,可能需要调整或者更换相关部件。
在晶圆搬运机器人维修方面,还要检查机器人的编码器。编码器如果出现故障,会影响机器人对自身位置的准确判断,从而导致运动精度下降。对于YASKAWA机器人维修,修复或更换编码器是解决这一问题的关键步骤。
对于安川机器人维修和YASKAWA机器人维修来说,定期维护是预防故障的关键。在晶圆搬运机器人维修中,定期检查机械部件的磨损情况,如每季度进行一次全面的关节检查。对于半导体机器人维修,定期清洁机器人,防止灰尘等杂质进入机器人内部影响其正常工作。



