
一、驱动器特性介绍
∑Ⅱ代表了伺服马达和驱动器技术的尖端高功能,高质量,小体积是∑Ⅱ成功之关键在∑Ⅱ产品中,有四种马达和一种驱动器。其规格从30w到7.5kw马达简介
1)SGMAH伺服马达
利于高加速度的高转矩-惯性比用于轻工业(IP55)额定速度3000rpm,最高速度5000rpm主要用途:电子装配,高速定寸裁切,成型机,PCB钻孔
2)SGMPH伺服马达
适用于恶劣的工作环境(IP67)长度最短的2Ⅱ伺服马达
额定速度3000rpm,最高速度5000rpm主要用途:半导体应用,食品包装,机器人
3)SGMGH伺服马达
一般用途的伺服马达
大容量(0.5KW到7.5KW)适用于恶劣的工作环境(IP67)主要用途:CNC工作母机,半导体应用,传送线,包装,转换机额定速度1500rpm,最高速度3000rpm
4)SGMSH伺服马达
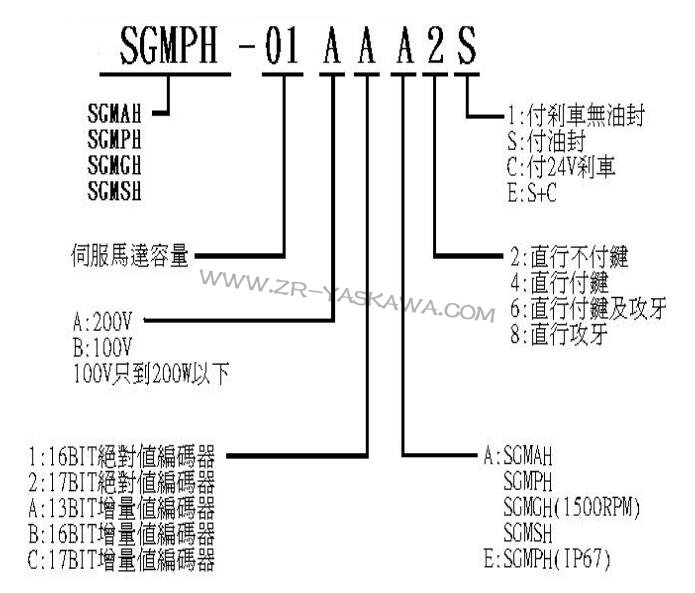
利于高加速度的高转矩-惯性比适用于恶劣的工作环境(IP67)额定速度3000rpm,最高速度5000rpm主要用途:制袋机,成型机,PCB钻孔,高速工作母机马达型号说明
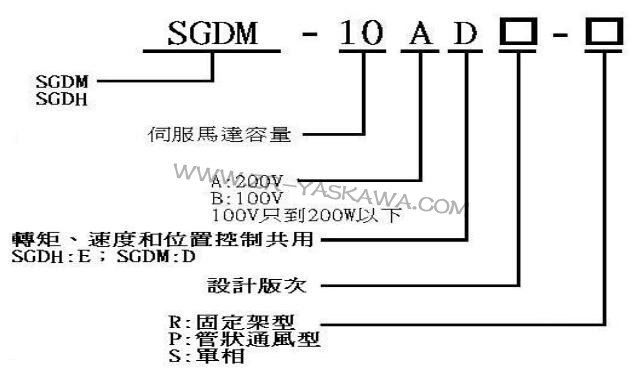
SGDM驱动器
400W或低于400W的100V或200V单相型800W和1500W的驱动器经改装后可使用单相200V电源。
500W或高于500W的200V3相
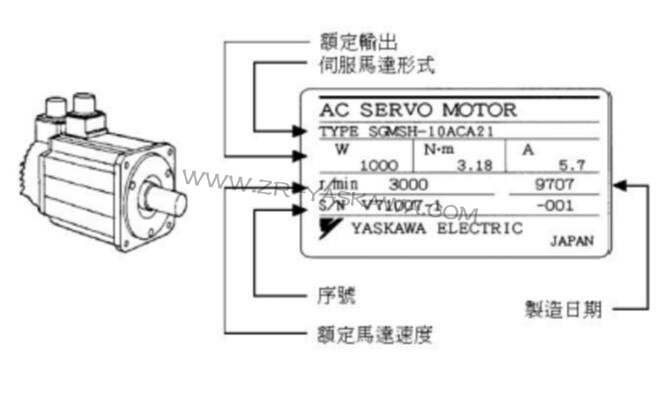
驱动器型号说明
驱动器型号说明
驱动器简介
安川机器人伺服驱动器故障排除:
| 警报显示 | 警报名称 | 意义 |
| A.02 | 使用者参数失效 | 服务器EEPROM资料异常 |
| A.03 | 主电路译码器异常 | 电源电路侦测异常 |
| A.04 | 使用者参数异常 | 使用者参数设定超出许可范围 |
| A.05 | 组合错误 | 伺服马达与伺服驱动器容量不匹配 |
| A.10 | 过电流或散热器过热 | 有一过电流流过IGBT散热器过热 |
| A.30 | 回生异常 | 回生电路故障或回生电阻故障 |
| A.32 | 回生过载 | 回生电能超过回生电阻容量 |
| A.40DC | 过电压 | 主回路DC过电压 |
| A.41 DC | 低电压 | 主回路DC低电压 |
| A.51 | 超速 | 马达转速过高 |
| A.71 | 过载:高负载 | 马达大量超过额定转矩下操作数秒或数十秒 |
| A.72 | 过载:低负载 | 马达大量超过额定转矩下连续操作 |
| A.73 | 动态制动器过载 | 当动态制动器作用时,旋转的能量超过动态制动器电阻容量 |
| A.74 | 突波电流限制器过载 | 主电路电源在ON与OFF间频频转 |
| A.7A | 散热器过热 | 服务器的散热器过热 |
| A.81 | 绝对值编码器备用电池错误 | 所有的绝对编码器电源均已失效且位置数据已被消除 |
|
A.82 |
编码器CHECKSUM检查错误 |
编码器内存的CHECK SUM检查结 果不正确 |
| A.83 | 绝对值编码器电池错误 | 绝对值编码器电池电压降低 |
| A.84 | 绝对值编码器资料错误 | 所收到的绝对资料异常 |
| A.85 | 绝对值编码器超速 | 当电源接上时编码器高速旋转 |
| A.86 | 编码器过热 | 编码器部温度太高 |
| A.bl | 速度指令输入读出错误 | 指令速度输入的A/D转换器故障 |
| A.b2 | 转矩指令输入读出错误 | 指令转矩输入的A/D转换器故障 |
| A.bF | 系统警报 | 服务器内发生一个系统故障 |
| A.Cl | 伺服超速运转 | 伺服马达失控 |
|
AC8 |
绝对值编码器清除异常及多次转动限制设定异常 |
绝对值编码器多次转动未正确清除或设定 |
| A.C9 | 编码器通讯错误 | 服务器与编码器间无法通讯 |
| A.CA | 编码器参数错误 | 编码器参数故障 |
| A.Cb | 编码器回授错误 | 与编码器的通讯内容不正确 |
| A.d0 | 位置错误脉冲满溢 | 位置偏差脉冲超过参数Pn505 |
| A.Fl | 电源线欠相 | 主电源一相未接 |
| CPFO0 | 操作器传输错误 | 操作器与服务器传输失效 |



