伺服的定义
正确的伺服构成以及伺服机械原理都是优良自动控制的一部分。目标值的任意变化构成了控制系统。
伺服的构成要素
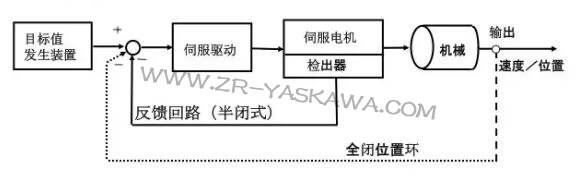
伺服的构成
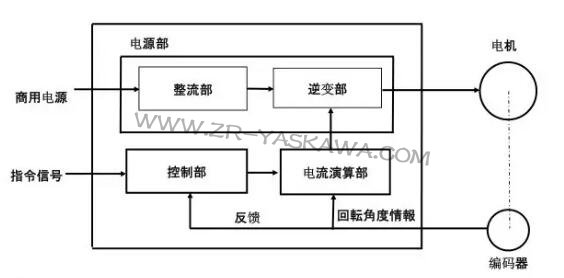
编码器的作用
①检测电气角度(或磁极)
为了使电机均匀地连续旋转,需要检测转子的电气转动角度,通入该位置所需的电流,其作用是检测该位置。
②检测负载位置和速度
作用是检测反馈控制(伺服本质)必不可少的位置、速度。
控制部的构成
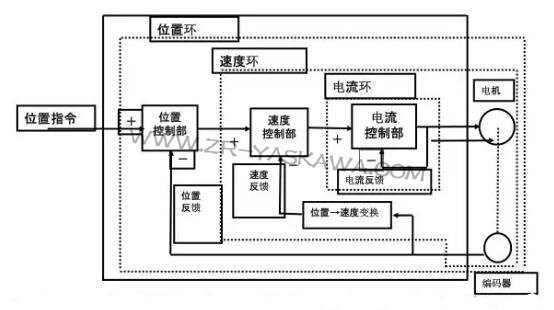
环路是由位置控制部、速度控制部、电流控制部发出的指合→控制部→输出→指令反馈所形成的闭合回路。
电流回路在伺服器内闭合,位置回路、速度回路向伺服驱动外输出。
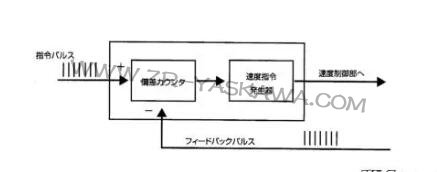
位置控制部的构成
·数字伺服的位置决定指合输入信号是脉冲列。
位置决定量是脉冲数,位置决定速度是单位时间(秒)的脉冲量。
(PPS:Pulse/Second)
·输人的脉冲量与反馈的脉冲数量相一致时,这才完成了位置决定这一构成。
·在位置控制部中,因为有输入脉冲的加算、反馈脉冲的减算,所以有一个计数器。
(也称幅差计数器)
速度控制部的构成
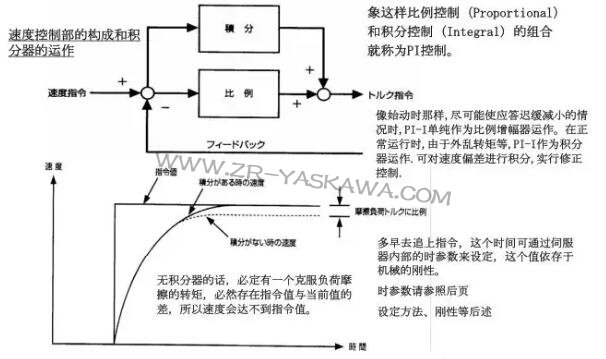
比例勤作(P助作)
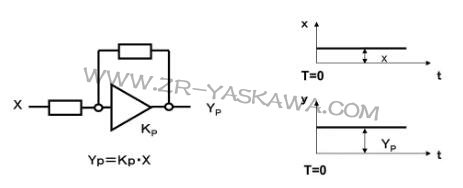
·将增益调整到一个相当的量时,比例动作增强,应答速度变慢。
·输入偏差为0时,有连续的运作。
精分勤作(I勤作)
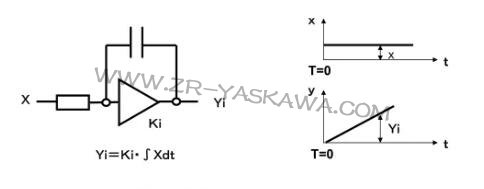
·幅差变小、负荷动作越困难
镉差微量存在,这个量就称为残留偏差(偏移)。
·即使是小幅差,也可以积累成大的操作量。直到幅差成为0,负荷才可以运作。
比例精分勤作(P-I勤作)
比例精分勤作(P-I勤作)
·P动作与I动作并用。
·Tr越短,动作表现越强。
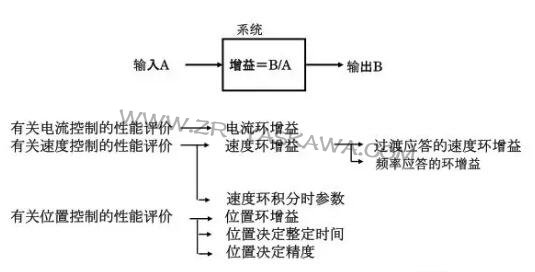
伺服的性能评价
评价伺服的应答性(指合输入后输出的情况(电机如何转动),使用回路增益这个用语。就是GAIN,获得和利益的意思。是输人和输出之比所解释的技术术语,现在直接使用增益来表示。
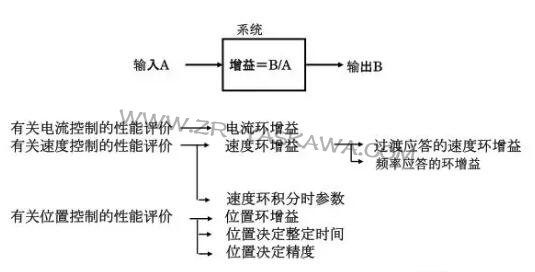
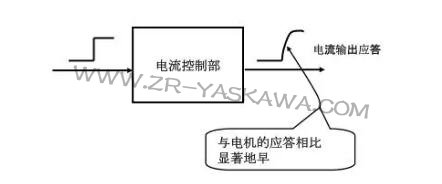
有关电流控制的性能评价
所谓电流控制的回路增益,就是由电流控制部输入电流指合,电流是
怎样流动的应答性。
售是,这个应答性是不依存机械而存在的,回路在伺服内部,并这个应答性可以充分地高,因此不能与机械相调整。
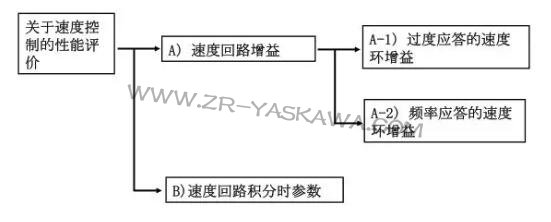
有关速度控制的性能评价
速度环增益和速度环积分时参数影响速度控制的性能。
速度环增益中又包括过度应答的速度环增益和频率应答的速度环增益。