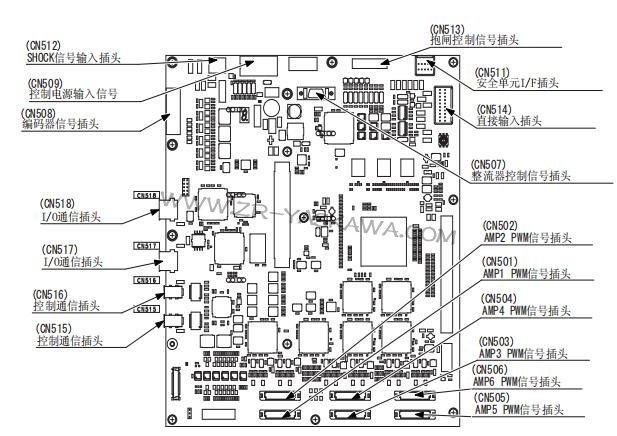
安川机器人轴控制基本维修,基本轴控制基板SRDA-EAX01,控制机器人六个轴的伺服电机,它也控制整流器、PWM 放大器和电源接通单元的电源接通顺序基板。
通过安装选项的外部轴控制基板SRDA-AXB01,可控制最多 9 个轴(包含机器人轴)的伺服电机。

基本轴控制基板SRDA-EAXA01除机器人基本轴的控制之外,还有以下的功能。
控制器电源控制回路
防碰撞传感器 (SHOCK)输入回路
直接输入回路
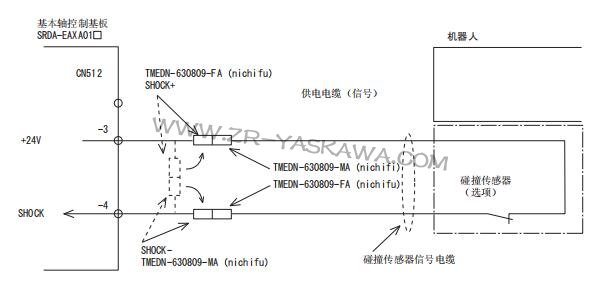
防碰撞传感器的连接方法
直接连接防碰撞传感器的信号线时
1. 在基本轴控制基板 EAXA-CN512 (动力插头)里,用端子销子把短
路连接的 【SHOCK-】和 {SHOCK+】销子拆开。
2. 首先把拆下来的端子销 【SHOCK-】和 【SHOCK】分别和碰撞传感器
的信号线连接。
|
端子名称 |
端子型号 |
信号线侧端子型号 |
| SHOCK- |
TMEDN-630809-MA |
TMEDN-630809-FA (nichifu) |
|
SHOCK+ |
TMEDN-630809-FA |
TMEDN-630809-MA (nichifu) |
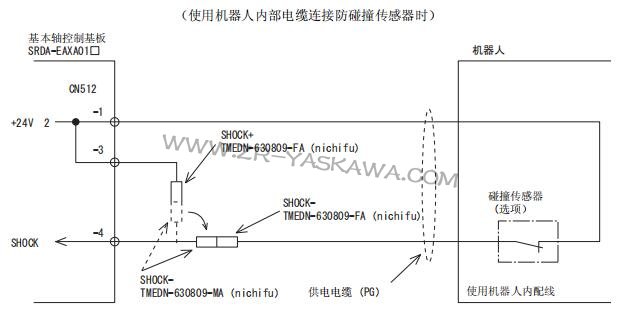
用机器人内部电缆连接防碰撞传感器时
1. 在基本轴控制基板 EAXA-CN512 (动力插头)里,用端子销子把短
路连接的 【SHOCK-】和 {SHOCK+】销子拆开。
2. 把分开的 SHOCK(+) 插头和机器人机内的防碰撞传感器信号线的
SHOCK(+) 连接。
因为防碰撞传感器是选项,标准配置机器人的机内防碰撞传
感器电缆没有连接防碰撞传感器。
机器人的机内防碰撞传感器电缆的配线,请参照使用的机器
人使用说明书中的配线图。