

n 5 个显示区 示教编程器的显示屏是 6.5 英寸的彩色显示屏。能够显示数字、字母和符号。 显示屏分为 5 个显示区,其中的通用显示区、菜单区、人机接口显示区、和主菜单区可以通过按 [ 区域 ] 键从显示屏上移开,或用直接触摸屏幕的方法,选中对象。 操作中, ...
安川机器人驱动器特性及故障排除
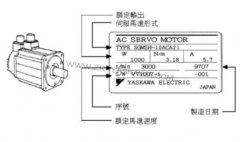
一、驱动器特性介绍 Ⅱ代表了伺服马达和驱动器技术的尖端高功能,高质量,小体积是Ⅱ成功之关键在Ⅱ产品中,有四种马达和一种驱动器。其规格从30w到7.5kw马达简介 1)SGMAH伺服马达 利于高加速度的高转矩-惯性比用于轻工业(IP55)额定速度3000rpm,最高速度 ...
安川伺服电机操作方法
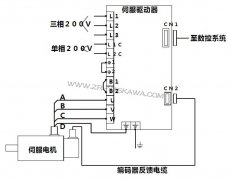
1.安川连接示意图 重要提示:由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。否则,会损坏编码器(此种精况,不在安川的保修范围!) 2.通电前的检查 1)确认安川伺服驱动器和电机插头的连接,相序是否正确: A.S G M电机分析 ...
MA1400安川机器人接地方法
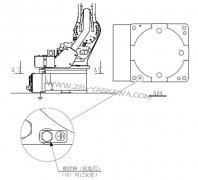
接地方法 根据电气设备技术标准及内线规程,按D种接地工艺进行,推荐使用 5.5mm2以上的接地线。 请按照图4-1接地方法将地线直接与机器人地线接头相连。 图4-1:接地方法 电缆的连接 机器人与DX100之间有两根电缆,一根信号电缆(1BC),一根电源电缆(2BC) ...

伺服驱动器警报代码和故障排除
安川伺服驱动器警报代码和故障排除 A.02 使用者参数失效 服务器EEPROM 资料异常 A.03 主电路译码器异常 电源电路侦测异常 A.04 使用者参数异常 使用者参数设定超出许可范围 A.05 组合错误 伺服马达与伺服驱动器容量不匹配 A.10 过电流或散热器过热 有一过电 ...

机器人示教器维修的优缺点
安川机器人示教器,手动操控机器人的关节运动,以使机器人运动到预订的方位,一起将该方位进行记载,并传递到机器人操控器中,今后的机器人可根据指令自动重复该使命,操作人员也能够挑选不一样的坐标系对机器人进行示教。 安川机器人示教器是示教编程的必备 ...



